
Quadrocopter selber bauen ist gar nicht so schwer
Quadrocopter selber bauen ist ein Experiment von mir. Das ist die erste Drohne, die ich selber baue und ich bin schon total gespannt. Ich weiss noch nicht was mich erwartet und auf welche Probleme ich stoßen werde.In diesem Artikel geht es um die Auswahl der ersten Drohne. Welche Bauteile und welches Werkzeug ist notwendig um eine Drohne selbst zu bauen.
Hintergrund ist der Start zu meinem neuen Hobby. Der Bau von Drohnen, Coptern, Multicopter, Quadrocopter, Hexacopter oder wie auch immer du es nennen willst. Ich kann schon fast den Aufschrei der Leute hören, die sich wirklich mit dem Drohnen Bau auskennen. Vermutlich wähle ich an der einen oder anderen Stelle das falsche Bauteil aus. Aber das gehört nunmal zum Lernprozess dazu.
Mittlerweile habe ich meinen Quadrocopter sogar schon umgebaut. Den Link findest du am Ende dieses Artikels.
Inhaltsverzeichnis
- Welche Drohne soll es denn sein?
- Quadrocopter Rahmen Auswahl
- Die richtigen Motoren
- ESC - Regelung für die Motoren Geschwindigkeit
- Das Herz - Der Flight Controller
- Auswahl des richtigen LiPo Akku Packs
- Fernsteuerung
- Kleinteile
- Werkzeuge für den Zusammenbau
- Teileliste
- Bestellung abgeschickt und das Warten beginnt
- Die Pakete sind da
- Der Zusammenbau
- Anbau der Ausleger an die untere Centerplate
- Vorbereiten der ESC Leitungen
- Lötstellen des PDB
- Die Lötkolbenspitze ist wohl zu klein
- Mit der neuen Lötstation ging es dann ... nicht
- Stecker an die Motorkabel löten
- Obere Centerplate verschrauben
- Motoren auf die Ausleger schrauben
- Flight Controller auf den Rahmen setzen
- ESC Leitungen verlegen
- Empfänger der Fernbedienung befestigen
- Empfänger mit dem Flight Controller verbinden
- Cleanflight Firmware auf den Flight Controller aufspielen
- Cleanflight konfigurieren
- Motorentest des Quadrocopter
- Propeller Mounts und Propeller anbauen
- Erster Flugtest
- Drohnenversicherung
- Selbstgebauter Quadrocopter - der erste Flug
- Fazit - und was ich anders machen würde

Welche Drohne soll es denn sein?
So, da stehe ich nun und weiss eigentlich nur, dass ich einen Quadrocopter selber bauen will. Da ich gerade zu Beginn nicht zu viel Geld reinstecken möchte, entscheide ich mich für einen Quadrocopter. Schliesslich benötige ich dafür nur 4 Motoren statt 6 Motoren bei einem Hexacopter. Also ist das schon mal günstiger.
Sicher bin ich mir gerade nur bei einer Sache:
Ich suche die Bauteile selbst aus und verzichte auf einen Bausatz. Kein Bausatz bei dem alles nur noch eben zusammengesteckt werden muss.
Den Rahmen baue ich natürlich nicht selbst. Das soll auch gar nicht so einfach sein, weil es hier auf Präzision ankommt. Dafür fehlen mir auch die Geräte. Alles andere, wie Löten und Einstellungen an der Software, übernehme ich selbst.
Also einen Quadrocopter selber bauen. Der ist einfach zu bauen und kann auch relativ kostengünstig gebaut werden.
Seien wir doch ehrlich: Gerade zu Beginn eines neuen Hobbys weiss man nie so genau ob es Spaß macht und wie lange man es macht. Dann doch lieber etwas weniger Geld ausgeben und sich nicht hinterher zu sehr ärgern.

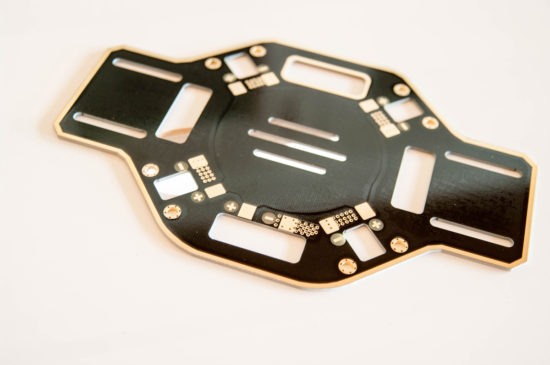
Quadrocopter Rahmen Auswahl
Der Rahmen eines Quadrocopters entscheidet über den Einsatzzweck. Ist der Rahmen zu klein, können möglicherweise nicht alle gewünschten Anbauteile montiert werden. So muss ich im Zweifel auf eine Kamera verzichten. Da dies mein erster Quadrocopter Bau ist, würde ich hier eh keine Kamera verbauen. Ich würde alles darauf verwetten, dass die Kamera nicht die ersten Tage übersteht.
Vor meinem geistigen Auge sehe ich sie schon auf dem Boden aufschlagen. Oh weh.
Eine Drohne mit Kamera werde ich mir auf jeden Fall noch zu einem späteren Zeitpunkt bauen. Zuerst will ich den Bau üben und vor allem die Steuerung während des Flugs eines Quadrocopters trainieren. Das ist nämlich gar nicht so einfach.
Selbst mit allen technischen Hilfsmitteln wie Gyroskop, Beschleunigungssensor, Geomagnetischer Kompass, Barometer und GPS. Das wichtigste ist der Typ an der Fernbedienung. Also Du oder Ich.
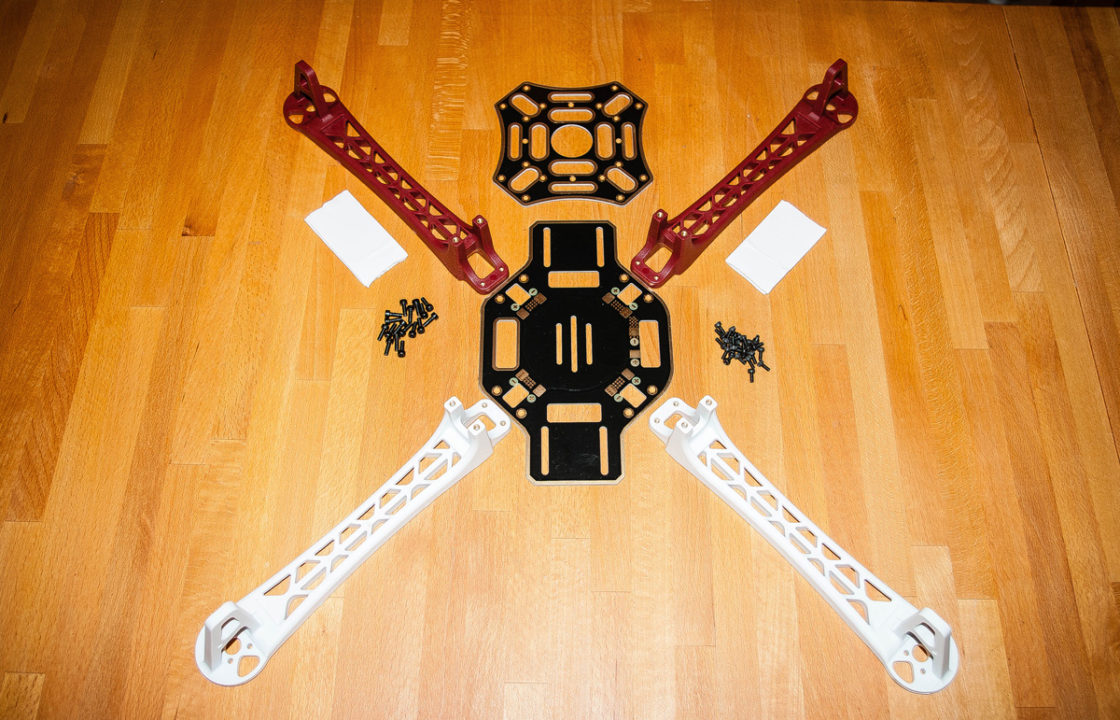
Ich entscheide mich für einen Rahmen mit Kunststoffausleger. Der wird zwar einen ordentlichen Treffer auf dem Boden kaum überstehen, aber dafür sind die Ersatzteile recht günstig zu bekommen. Der Andoer F450 Rahmen kostet unter 20 Euro und wird mir hoffentlich gute Dienste leisten.
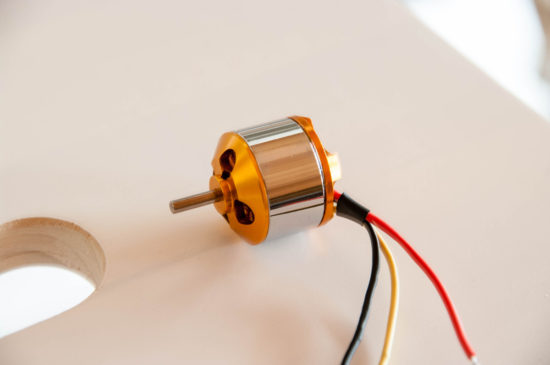

Die richtigen Motoren
Der Rahmen ist also klar. Fehlen noch die vier Quadrocopter Motoren. Für den Rahmen gibt es die Empfehlung A2208 oder A2212 zwischen 800kV und 1100kV.
Beim Kauf immer darauf achten, dass Akkus, ESC, Motor und Propeller zusammen passen. Zu kleine oder zu große Propeller lassen den Motor überhitzen. Wäre doch schade drum.
Ich nehme den ParaAiluRy A2212 1000kV inkl. 10″ x 4,5″ Propeller Satz. Mein Kumpel, der sich schon besser mit dem Quadrocopter Bau auskennst, sagte das ich zumindest am Anfang immer genug Propeller haben sollte. Lieber ein paar zu viel als zu wenig. Daher bestelle ich gleich noch ein paar zusätzliche Propeller mit.

ESC – Regelung für die Motoren Geschwindigkeit
Die ESC (Electronic Speed Controller) sind für die Steuerung der Motoren Geschwindigkeit notwendig. Ein Multicopter fliegt nur, weil jeder einzelne Motor getrennt von allen anderen geregelt werden kann.
Daher werden 4 Stück benötigt. Pro Motor also ein ESC.
Die Stärke des ESC hängt von der maximalen Stromaufnahme des Motors ab. Die ParaAiluRy A2212 sind mit 12A angegeben. Um noch etwas Leistungsreserve zu haben, rechne ich 20% drauf und sind bei 14,4. Der nächsthöhere ESC liegt bei 15A.
Daher verwende ich 12A der SimonK Serie mit einem Burst von 15A. Das sollte eigentlich reichen.


Das Herz – Der Flight Controller
Der Flight Controller kann auch als Herz des Quadrocopters bezeichnet werden. Ohne einen Flight Controller wäre die Steuerung eines Copters fast unmöglich. Schliesslich müsste der Pilot alle vier Motoren irgendwie gleichzeitig bedienen können.
Da ich „nur“ einen Quadrocopter bauen will, kann ich so ziemlich jeden Flight Controller nehmen. Erst ab Octocopter (8 Motoren) wird die Auswahl kleiner.
Für meinem Quadrocopter nehme ich einen Naze32 10DOF kompatiblen Flight Controller Naze32 6DOF kompatiblen Flight Controller. Dieser hat ein Gyroskop und einen Beschleunigungssensor.
Als Firmware für den Flight Controller wird Cleanflight empfohlen. Da ich bisher komplett unbelastet bin, also überhaupt keine Ahnung habe, übernehme ich einfach mal diese Empfehlung.
Achtung: Naze32 ist nicht Naze32. Es gibt zum Beispiel die Bezeichnung 6DOF und 10DOF, sowie Acro und Full.
Der Acro bzw. 6DOF verfügt über ein Gyroskop (Lagesensor) und einen Accelerometer (Beschleunigungssensor). Ohne diese beiden Sensoren könne man einen Copter wohl nur sehr schwer fliegen.
Dazu kommt dann in der Full oder 10DOF Version ein Barometer (Luftdruck) und ein Magnetometer (Magnetfelder).
Der Naze32 wird übrigens nur „halbfertig“ ausgeliefert. Die Steckerleisten müssen noch selbst auf die Platine gelötet werden. Gerade wenn man mit dem Lötkolben noch nicht so gut umgehen kann ist das eine relativ fummelige Arbeit.
Vor allem muss man beim löten aufpassen auch ordentlich vorzugehen. Mein drohneCopter ist bei meinem ersten Testflug nach einiger Zeit immer zur Seite gekippt und ich habe mit den PID Einstellungen alles probiert was geht. Bis ich mir die Lötpunkte unter der Lupe noch genauer angeschaut habe. Da war ein Lötpunkt nicht korrekt. Also kurz neu angelötet und siehe da: Der Coper lief die ganze Zeit ruhig.

Auswahl des richtigen LiPo Akku Packs
Das letzte Bauteil des eigentlichen Quadrocopter ist das LiPo Akku Pack. Auch das Akku Pack muss zu den Motoren und den ESC’s passen. Ein LiPo Akku hat pro Zelle 3,7V. Bei meiner Zusammenstellung sind maximal 3 Zellen möglich.
Für meinen Copter benutze ich Gens ace LiPo Akku Pack 2200mAh 11.1V 25C mit 3 Zellen. Da ich diesen Artikel vor dem ersten Flug schreibe, weiss ich noch nicht wie lange mein Quadrocopter fliegen wird. Das werde ich dann später ermitteln und hier mitteilen. Falls das Teil überhaupt vom Boden abhebt.

Fernsteuerung
Die Fernsteuerung meines Quadrocopters macht mir gerade am meisten Kopfschmerzen. 6 Kanäle würden zwar ausreichen, aber mehr auch nicht. Spätere Modelle mit mehr Schnick Schnack könnte ich damit kaum fliegen. Also werden es mindestens 10 Kanäle.
Am Anfang des Artikels habe ich ja bereits erwähnt, dass ich nicht zu viel Geld ausgeben will. Und glaube mir, für eine Fernbedienung kann man richtig viel Geld ausgeben.
Die Enthausiasten werden mich bestimmt steinigen: Es wird die Orange Radiolink AT10. Dabei handelt es sich offensichtlich um ein sogenanntes China Produkt. Doch welche Technik Teile kommen heute nicht aus China oder Asien? Für mich als Einsteiger wird diese Fernsteuerung reichen.
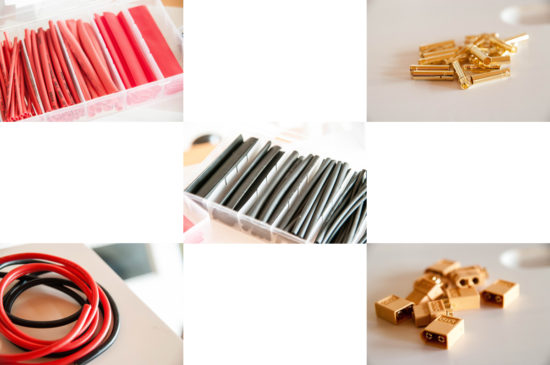
Kleinteile
Ein paar Kleinteile sind für den Aufbau natürlich auch notwendig.
Da ich überhaupt noch kein Material habe, bestelle ich noch folgende Kleinteile gleich mit:
- Schrumpfschlauch Sortiment
- Silikonleitung 10AWG in schwarz und rot
- XT60 Stecker und Buchsen
- Lötzinn
- Kabelbinder in verschiedenen Größen
- Goldkontakt Stecker und Buchsen 2mm
Von den Kleinteilen kann man gar nicht genug haben.
Werkzeuge für den Zusammenbau
Auch hier bin ich blank. Ich habe nicht ein Werkzeug was sich für den Bau eines Quadrocopter eignet. Klar habe ich Werkzeug, aber das ist eher für grobe Arbeiten gedacht. Auch meine Zangen in der Garage sind nicht für feine Arbeiten ausgelegt. Mein alter Lötkolben ist so ein einfaches Ding ohne Temperaturanzeige. Daher habe ich zuerst überlegt mir einen neue Lötstation zu kaufen. Doch die Kosten dafür möchte ich mir am Anfang lieber sparen. Also verwende ich das alte Ding und kaufe nur neue Lötspitzen in verschiedenen Größen.
Zur Sicherheit bestelle ich mir auch gleich eine Lötmatte mit. Gerade wenn man noch nicht so geschickt mit dem Umgang ist, kann eine Lötmatte sehr sinnvoll sein. Da macht es dann auch nichts wenn der Lötkolben mal auf den Tisch fällt.
Update: Und die Lötmatte hat sich jetzt schon bezahlt gemacht.
Was ich noch unbedingt brauche ist eine dritte Hand. Die dritte Hand hilft extrem bei Lötprojekten. Gleiches gilt für eine Entlötpumpe. Damit kann man auch Missgeschicke wieder ausgleichen.
Auch eine gute Abisolierzange für Kabel und Brenner mit Feuerzeug für das Schrumpfen des Schrumpfschlaues besorge ich mir direkt mit.
Als nächstes sind die Zangen daran. Ich entscheide mich hier nicht für die Knipex Varianten sondern für das günstige Mannesmann Elektronik Zangen Set.
Teileliste
- Andoer F450 Rahmen
- ParaAiluRy A2212 1000kV inkl. 10″ x 4,5″ Propeller Satz
- Ersatzpropeller
- ESC 12A der SimonK Serie
Naze32 10DOF kompatiblen Flight Controller- Naze32 6DOF kompatiblen Flight Controller
- Gens ace LiPo Akku Pack 2200mAh 11.1V 25C
- Orange Radiolink AT10
- Schrumpfschlauch Sortiment in rot und schwarz
- Silikonleitung 10AWG in schwarz und rot
- XT60 Stecker und Buchsen
- Kabelbinder in verschiedenen Größen
- Lötzinn
- Goldkontakt Stecker und Buchsen 2mm
- Mannesmann Elektronik Zangen Set
Bestellung abgeschickt und das Warten beginnt
Jetzt, da die Bestellung abgeschickt ist, beginnt die Wartezeit. Liefertermin soll bereits morgen sein. Trifft sich gut, weil morgen Freitag ist. Allerdings müsste ich vorher die Garage aufräumen, da meine Frau nicht sehr begeistert sein wird, wenn ich den Küchentisch in Beschlag nehme.
Update: Es ist doch der Küchentisch geworden. Die Garage aufzuräumen hätte doch sehr viel Zeit gekostet.
Ich muss gestehen, jetzt nach dem Abschicken der Bestellung kann ich es kaum abwarten.
Natürlich stellen sich mir jetzt einige Fragen:
- Habe ich nicht zu viel Geld für ein Hobby ausgegeben?
- Habe ich die richtigen Teile bestellt?
- Kann ich mit einem Lötkolben umgehen?
- Kriege ich das Ding überhaupt zusammen und flugfähig?
Und noch viele andere Fragen auf die ich im Moment auch keine Antwort habe. Trotzdem überwiegt im Moment die Vorfreude auf das Paket.

Die Pakete sind da
Mein erster Gedanke als ich die ganzen Pakete gesehen habe: Hoffentlich ist alles dabei. Und es ist alles dabei. Dann kann ich direkt mit dem Aufbau beginnen.
Der Zusammenbau
Nachdem ich dir jetzt alles über die Bauteile, das Werkzeug und die Kleinteile erzählt habe, kommen wir zum angenehmen Teil des Quadrocopter Bau: Der Aufbau.
Als erstes schraube ich die Ausleger an die untere Centerplate. Die roten Ausleger werden den vorderen Teil meines Quadrocopter kennzeichnen. Das ist deshalb wichtig weil das auch später die Flugrichtung vorwärts sein wird.

Anbau der Ausleger an die untere Centerplate
Ich kann mich gar nicht daran erinnern wann ich das letzte Mal M2 Innensechskant Schrauben reingedreht habe. Bei meinem Feinmechanikerkasten war diese Größe gar nicht dabei.
Aber in der Garage habe ich noch ein stinknormales Bit Set mit M2 und M3 gefunden. Soviel zum Thema „nur grobes Werkzeug“.
Super! Genau das was ich brauche.
Die Ausleger waren sehr schnell an die Centerplate angeschraubt.

Vorbereiten der ESC Leitungen
Die ESC Leitungen zum Motor hin, versehe ich mit den Goldkontakthülsen. Das mache ich eigentlich nur, weil ich bisher noch keine Ahnung habe in welche Richtung sich welcher Motor dreht. Damit ich das unter Umständen später schnell ändern kann, habe ich mich für Stecker entschieden.
Ich könnte die Leitung auch anlöten.
Das mache ich wohl mit den beiden letzten Leitungen am letzten ESC. Das Problem ist, dass ich nur 10 Goldkontaktstecker Paare bestellt habe. Aber pro ESC gehen drei Leitungen zum Motor, was in Summe 12 macht. Also fehlen mir 2 Stecker Paare. Aber kein Problem. Ich verlöte einfach die letzten beiden und hoffe das genau der Motor schon die richtige Drehung hat. Ansonsten öffne ich die Verbindung nochmal und vertausche die zwei Kabel.
Wie du auf dem Bild siehst, schaffe ich es noch nicht den Schrumpfschlauch am Ende komplett zu schliessen. Das ist hier nicht weiter tragisch, weil ich den Copter nicht bei Feuchtigkeit fliegen lasse. Aber genau hier könnte eine Fehlerquelle entstehen.
Eventuell war der Durchmesser des Schrumpfschlauches einfach zu groß. Ich werde das bei Gelegenheit mal prüfen.
Update: Genau das war das Problem. Wenn der Schrumpfschlauch zu groß ist, dann zieht er sich auch nicht komplett über das Kabel zusammen. Hier auch auf das Schrumpfverhältnis achten.

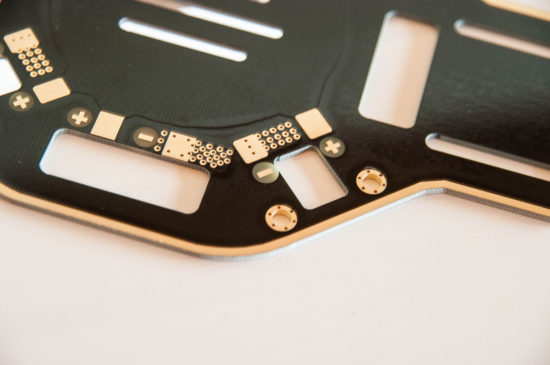
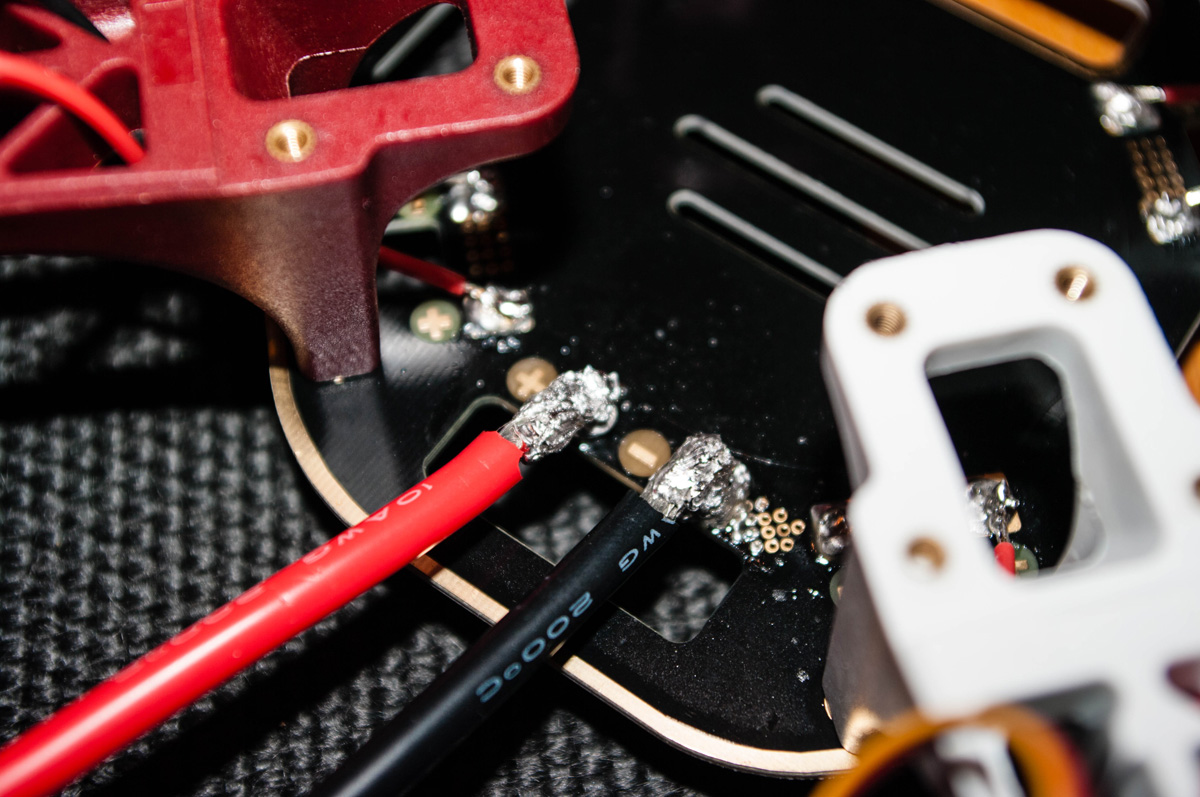
Lötstellen des PDB
Auf dem Rahmen meines Quadrocopters gibt es bereits ein integriertes PDB (Power Distribution Board). Dieser dient als Stromverteiler. Hier werden die ESC mit Plus und Minus Leitung angeschlossen. Auch das Akkukabel wird am PDB angeschlossen.
Dazu habe ich bereits die Lötstellen vorbeireitet, indem jeder Plus und Minus einen kleinen Klecks Lötzinn bekommen hat. So kann ich im nächsten Schritt die ESC und Akku Leitungen einfacher verlöten.
Mit Akku Leitung meine ich hier zusätzliche Plus und Minus Kabel die mit einem Stecker versehen werden. Dieser Stecker wird dann später mit dem Akku Pack verbunden.


Die Lötkolbenspitze ist wohl zu klein
Nachdem das Verlöten des PDB bisher so gut funktioniert hat, habe ich mich dran gemacht und wollte die 10AWG Leitungen für Plus und Minus an den Akku auf das PDB löten. Doch ich habe es weder hinbekommen das Lötzinn vernünftig am Kabel zu verteilen, geschweige denn auf dem Punkt auf dem Board.
Ich nutze ja einen ganz einfachen Lötkolben und die Lötspitze ist sehr dünn und klein. Damit ist es nicht möglich genug Hitze für die Akkukabel zu erzeugen. Und die Lötspitzen, die ich bestellt habe, sind nicht für meinen Lötkolben geeignet.
Auf dem ersten Bild sieht man das Missgeschickt. Auf dem zweiten Bild habe ich es bereits wieder bereinigt.

Mit der neuen Lötstation ging es dann … nicht
Also mein 15 Watt Lötkolben ist definitiv zu schwach für die Akkukabel. Aber auch mit meiner neuen Lötstation, die ich in der Zwischenzeit gekauft habe, funktionierte es nicht viel besser. Da sind richtige Lötberge entstanden. Aber die Kabel sitzen fest. Tatsächlich haben sich die Kabel später gelöst. Gott sei Dank nicht im Flug.
Ich hoffe einfach mal das es funktioniert. Das wird einer der Punkte sein, die ich in einem späteren Projekt wieder umbauen werde.

Stecker an die Motorkabel löten
Damit ich die ESC und Motorstecker später besser tauschen kann, habe ich sie mit Goldsteckern und Buchsen versehen. Falls hinterher ein Motor in die falsche Richtung dreht, kann ich schnell zwei Kabel tauschen.
Auch das werde ich später dann im Folgeprojekt auflösen und die Kabel direkt verlöten. Jetzt für den ersten Versuch ist das für mich einfacher.
Einen ESC und Motor muss ich eh direkt verlöten, weil ich nicht genug Goldstecker habe.

Obere Centerplate verschrauben
So langsam sieht mein Quadrocopter tatsächlich auch wie einer aus.
Während ich die obere Centerplate verschrauben will, fällt mir auf, dass Centerplates und Ausleger noch nicht ganz so zusammen passen. Daher muss ich die Schrauben der unteren Centerplate nochmal lösen. Danach dann die obere Centerplate einpassen und verschrauben.
Wie immer die Schrauben der einzelnen Ausleger über Kreuz festziehen.

Motoren auf die Ausleger schrauben
Bei den Motoren war ich mir zuerst nicht sicher, wie ich sie befestigen muss. In dem Päckchen waren neben dem Motor noch vier kleine Schrauben und ein Metallkreuz. Wie ich dann herausgefunden habe, muss an meinem Ausleger dieses Kreuz nicht montiert werden. Da es so viele verschiedene Modelle gibt, werden diese Kreuze einfach dazu gepackt.
Jeder Motor wird mit vier Schrauben am Ausleger befestigt. Ich habe die Schrauben genommen, die beim Rahmen dabei waren. Ich habe extra darauf geachtet, dass sie nach dem einschrauben nicht den Motor blockieren. Das ist durchaus möglich, wenn die Schrauben zu lang sind.
Meine Motoren sind keine CW bzw. CCW Modelle. CW bedeutet Clockwise (im Uhrzeigersinn) und CCW bedeutet Counter Clockwise (gegen den Uhrzeigersinn). Das ist wichtig für die Position der Motoren am Quadrocopter.
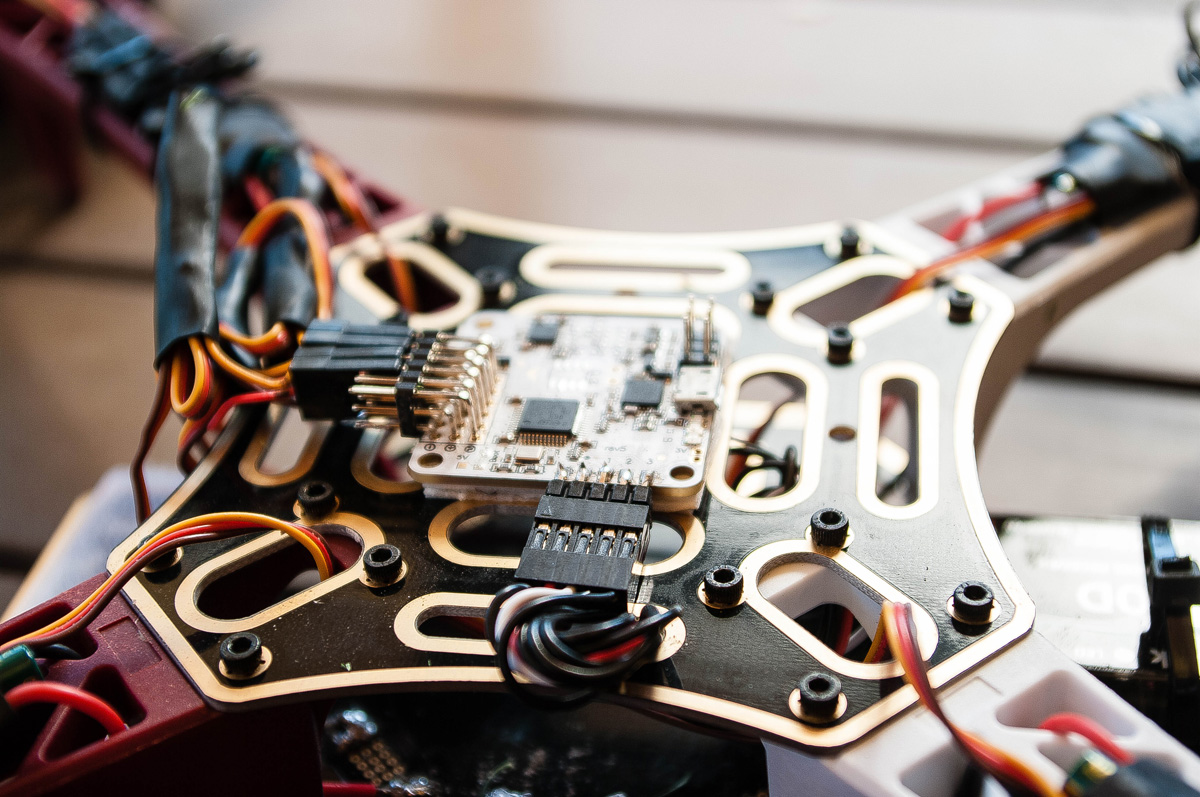
Flight Controller auf den Rahmen setzen
Der Flight Controller ist einer der wichtigsten Bauteile eines Quadrocopter. Er sollte nicht zu locker auf dem Rahmen und nach Möglichkeit auch direkt in der Mitte sitzen.
Aber keine Sorge!
Die Position kann später auch in der Firmware noch angepasst werden. Zum Beispiel wenn man den Flight Controller etwas gedreht verbaut.
Leider habe ich hier einen weiteren Fehler gemacht. Ich habe den Flight Controller auf die obere Centerplate gesetzt. Warum weiß ich jetzt leider auch nicht mehr. Das sorgt bei meinem Quadrocopter für zwei Probleme. Erstens sieht es nicht so toll aus, wenn der Flight Controller oben drauf sitzt. Zweitens sollte das eigentlich der Platz für den Akku sein.
Wieder ein Punkt auf meiner Liste für den späteren Umbau.
Den Flight Controller habe ich übrigens mit Montageband befestigt. Dazu habe ich drei Lagen Montageband aufeinander geklebt und dann auf den Flight Controller gesetzt. Dieser haftet somit waagerecht auf der oberen Centerplate. Außerdem dämpft das Montageband Vibrationen, die während des Fluges entstehen.

ESC Leitungen verlegen
Die übrigen Leitungen der ESC’s habe ich dann zum Flight Controller verlegt. Die Leitungen habe ich durch den Ausleger und dann unten durch geführt. Hier wäre es von Anfang an besser gewesen die ESC unter die Ausleger zu setzen.
Das habe ich beim Aufbau eines anderen Quadrocopter im Internet gesehen und die Idee überzeugt mich. Kommt mit auf die Liste der Umbauten.
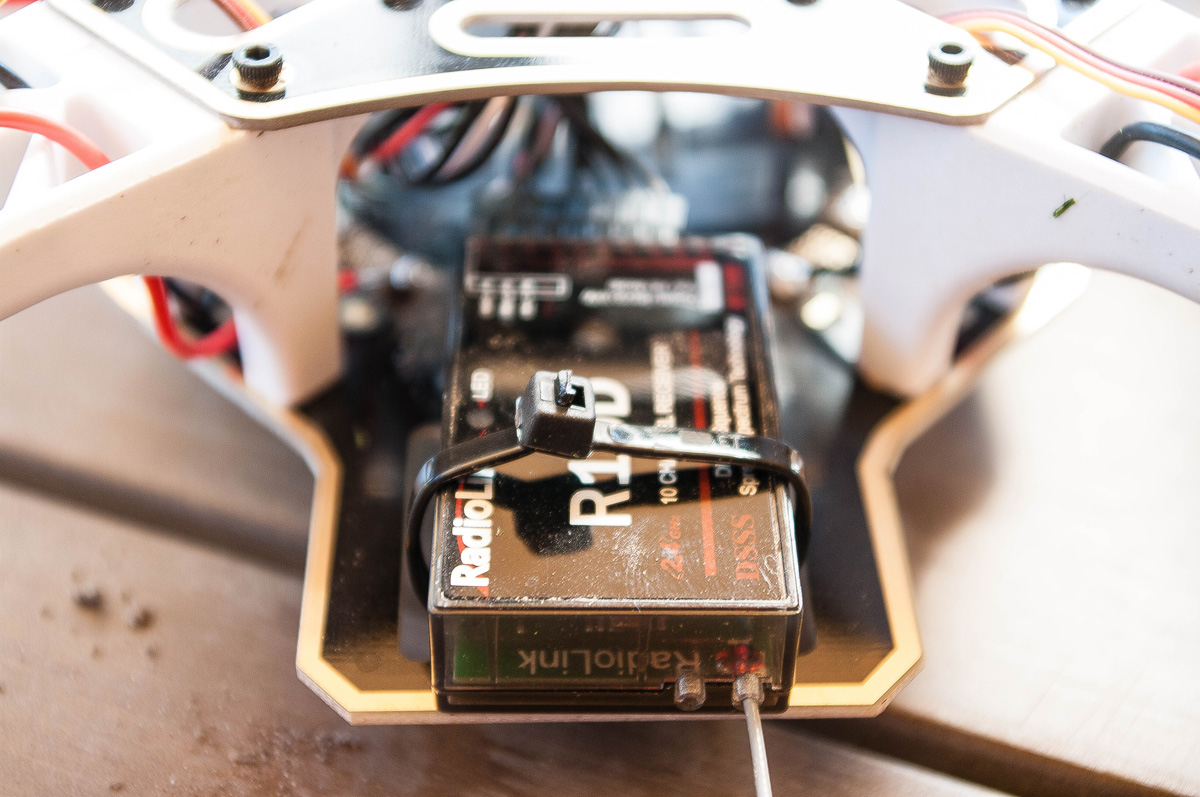
Empfänger der Fernbedienung befestigen
Bei der Montage gibt es mehrere Möglichkeiten. Entweder per Klettverschluss, damit man später den Empfänger schnell zwischen verschiedenen Modellen wechseln kann. Per Kabelbinder. Oder einfach per doppelseitigen Klebeband. Ich habe mich für das den Kabelbinder entschieden. Den könnte ich im Notfall auch wieder ab machen. Trotzdem überlege ich schon jetzt ob ich das später nicht wieder ändern werde.
Der Empfänger RD10 der Radiolink kostet knapp 20 Euro. Für mein nächstes Modell werde ich daher noch einen Empfänger dazu kaufen.
Den Empfänger habe ich am Heck des Quadrocopter angebracht und die Antenne zeigt nach hinten raus.

Empfänger mit dem Flight Controller verbinden
Die Kanäle 1-4 sind bei meiner Fernbedienung nicht änderbar. Dabei handelt es sich um AETR.
Aileron auf Kanal 1 (roll)
Elevator auf Kanal 2 (pitch)
Throttle auf Kanal 3 (throttle)
Rudder auf Kanal 4 (yaw)
Was das genau ist, werde ich in einem anderen Artikel noch beschreiben.
Wichtig ist, dass diese ersten vier Kanäle für mich nicht änderbar sind. Also muss ich die Kabel des Empfängers bereits so mit dem Flight Controller verbinden. Die Kanäle 5-10 kann ich in der Fernbedienung frei auf alle Schalter verteilen wie ich möchte.
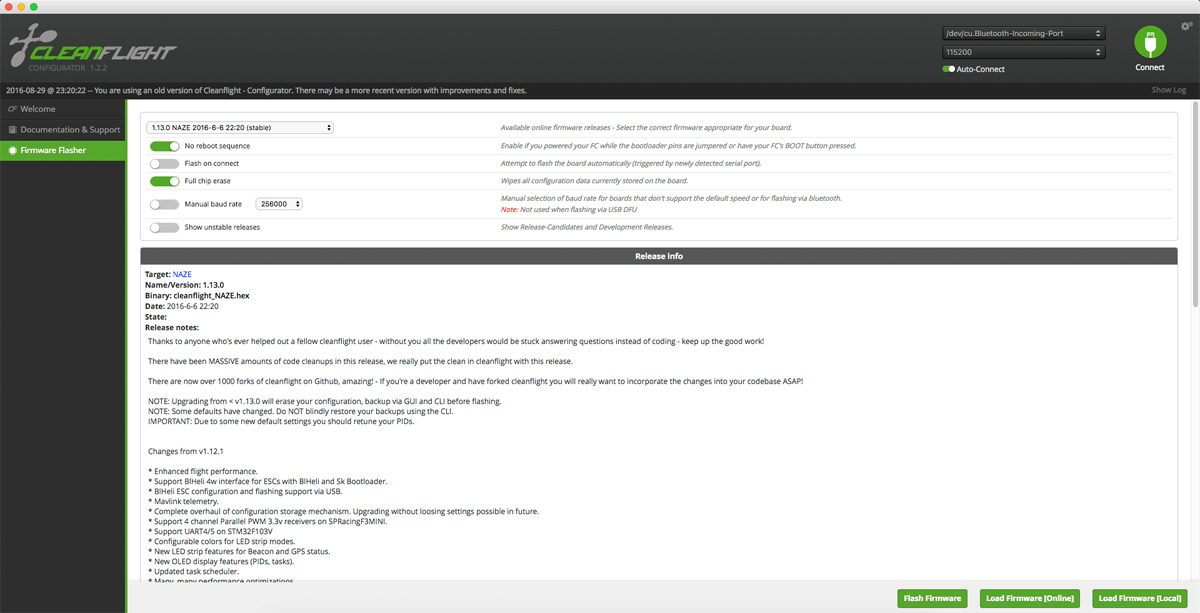
Cleanflight Firmware auf den Flight Controller aufspielen
Das Aufspielen der Firmware auf den Flight Controller hat mir am Anfang die meisten Probleme bereitet. Irgendwie wollte sich der Flight Controller nicht mit meinem Mac verbinden. Das lag an den fehlenden Treibern CP210x USB to UART Bridge VCP Drivers.
Außerdem wurde mir immer angezeigt, dass der Bootloader nicht erreicht werden konnte. Dazu habe ich erst das USB Kabel abgezogen. Dann die Bootloader Pins auf dem Flight Controller überbrückt und währenddessen das USB Kabel wieder verbunden.
Danach ging es dann wirklich einfach. Ich habe die Firmware über den Button „Load Firmware [Online]“ geladen und dann mit „Flash Firmware“ das Flashen gestartet.

Cleanflight konfigurieren
Ich will mich hier kurz fassen. Die genaue Konfiguration werde ich an anderer Stelle noch beschreiben. Dafür ist das Thema einfach zu wichtig um es hier in zwei oder drei Sätzen abzuhandeln.
Cleanflight bietet eine Fülle an Einstellungsmöglichkeiten. Und das ist auch notwendig um den Quadrocopter optimal einzustellen.
Standartmässig ist nur der Acro Mode aktiviert. Dabei wird nur das Gyroskop zur Stabilisation verwendet. Damit ist der Quadrocopter aber sehr schwer zu fliegen. Trotzdem ist es notwendig die Einstellungen erstmal in diesem Modus vorzunehmen, weil alle anderen Modi auf diesen aufbauen.

Motorentest des Quadrocopter
Achtung: Nicht mit angebauten Propellern ausführen.
Jetzt wird es Zeit für einen ersten Motortest. In Cleanflight unter „Configuration“ -> „Mixer“ muss Quad X eingestellt sein. Der Motor 1 ist unten rechts, Motor zwei ist oben rechts, Motor 3 ist unten links und Motor 4 ist oben links. Das ist wichtig zu wissen. In einer anderen Firmware kann dies auch anders sein.
Die Drehrichtung der Motoren:
(unten rechts) Motor 1: CW = im Uhrzeigersinn
(oben rechts) Motor 2: CCW = gegen den Uhrzeigersinn
(unten links) Motor 3: CCW = gegen den Uhrzeigersinn
(oben links) Motor 4: CW = im Uhrzeigersinn
Unter „Motors“ kann man jetzt die Funktion aktivieren, dass man in Cleanflight die Motoren starten kann. Das mache ich jetzt einfach. Danach spiele ich sehr vorsichtig mit den Schiebereglern um zu schauen in welche Richtung sich die Motoren drehen.
Ich musste noch 2 Motoren anpassen und die Kabel umstecken bzw. umlöten.
Danach der finale Motorentest ob nach dem umstecken bzw. umlöten alle Motoren in die richtige Richtung laufen.
Achtung: Niemals mit aufgesetzen Propellern ausführen. Das kann wirklich zu sehr ernsten Verletzungen führen.

Propeller Mounts und Propeller anbauen
Meine Propeller Mounts sind nicht selbstsichernd. Daher muss ich hier besonders auf festen Sitz achten. Den Propeller montiere ich erst ganz zum Schluss. Trotzdem sollte alles sicher angezogen sein. Ich möchte nicht, dass die Schraube unkontrolliert abfliegt.
Da meine Motoren keine CW bzw. CCW Motoren sind, ist es egal welchen Mount ich an welchen Motor schraube. Das gilt nicht für die Propeller. Diese sind CW bzw. CCW zu verbauen.


Erster Flugtest
Mein erster Flugtest war doch sehr ernüchternd. Mein Quadrocopter kippte immer zur linken Seite. Egal was ich gemacht habe. Im Internet habe ich den Tipp gefunden mal beherzt das Gas zu erhöhen. Das habe ich gemacht und wieder Crash.
Da ich die ersten Tests auf der Wiese gemacht habe, sind keine Schäden am Copter aufgetreten. Außer das ein oder zwei Propeller etwas ausgefranst sind. Nach den Tests werde ich sie dann austauschen.
Zwei Stunden lang habe ich in Cleanflight konfiguriert, immer wieder die Motordrehungen überprüft und schon fast verzweifelt.
Und, was soll ich sagen: Die Propeller waren auf der falschen Position. Auch hier gibt es CW und CCW Propeller.
Wie die Propeller montiert werden müssen ist eigentlich ganz einfach. Das Propellerblatt ist in Motorlaufrichtung aufsteigend. Im Uhrzeigersinn ist die niedrige Kante vorne und erhöht sich nach hinten. Gegen den Uhrzeigersinn ist die niedrige Kante hinten und erhöht sich nach vorne.
Nachdem die Propeller jetzt auch endlich richtig montiert waren, ging es zum ersten Flug im Acro Modus.
Und das ist echt schwer.
Zumindest am Anfang. Ich hatte Mühe den Quadrocopter in der Luft zu halten. Außerdem ging er irgendwie immer zu einer Seite. Die Steuerung war da noch sehr empfindlich. Oft habe ich auch einfach zu stark gesteuert.
Ich habe dann in Cleanflight den Angle und Horizon Modus auf einen Schalter gelegt. Als ich die Modi aktiviert habe, funktionierte es wesentlich besser. Zumindest um mal reinzukommen und ein Erfolgserlebnis zu haben, sind die beiden Modi ganz gut.
Die richtigen Einstellungen müssen dann später eh im Acro Modus gemacht werden. Aber das ist dann Tüftelarbeit, die von Copter zu Copter unterschiedlich ist. Da können schon kleine Änderungen in der Verlagerung oder beim Gewicht des Akkus eine Rolle spielen. Daher ist es auch nicht sinnvoll die PID Werte von anderen zu übernehmen.
Drohnenversicherung
Ganz wichtig: Erkundige dich bei deiner Versicherung ob solche Schäden abgedeckt sind. Wenn nicht, dann besorge dir dringend eine Drohnen Versicherung. Wenn der Quadrocopter außer Kontrolle gerät, dann können schwere Schäden und auch Verletzungen an anderen Personen möglich sein. Allerdings ist eine spezielle Drohnen Versicherung nicht unbedingt Pflicht.
Selbstgebauter Quadrocopter – der erste Flug
Die PID Einstellungen sind noch nicht perfekt. Aber er fliegt. Und genau an dem Punkt gab es bei mir einen weiteren Schub. Es hat einfach richtig Bock gemacht.
Fazit – und was ich anders machen würde
Erstmal muss ich sagen, dass ich schon lange nicht mehr so viel Spaß hatte. Beim Aussuchen der Bauteile, aber auch beim Zusammenbau und beim ersten Flug.
Es macht einfach riesigen Spaß.
Aber ich habe auch eine Menge gelernt.
Das würde ich beim nächsten Mal anders machen:
- Kabel unter den Auslegern verlegen
- Kabel mit Gewebeschlauch ummanteln
- Flight Controller auf die untere Centerplate
- Akku auf die obere Centerplate
Über das alles. Und noch viel mehr werde ich in den nächsten Wochen, Monaten und Jahren schreiben. Ich habe mein neues cooles Hobby gefunden.
Und ich habe schon viele neue Ideen für den Umbau. Hier geht es zu meinem Quadrocopter Umbau.
Und eines ist sicher: Den nächsten Quadrocopter den ich selber bauen will ist ein 250er Racer.






Wow. Tolle Anleitung. Schön das es wieder einen mehr gibt, der sich für Quadrocopter interessiert. Und glaube mir, dass macht wirklich Spaß.
Ich bin jetzt gerade dabei meinen 11 Copter zu bauen. Diesmal einen Hexacopter.
– Christian –
Danke für deinen Kommentar. Du baust gerade den 11.? Krass! Aber ich könnte mir vorstellen irgendwann auch so verrückt zu sein 🙂
Viele Grüße,
Dirk
Deine ersten Flugübungen kommen mir sehr bekannt vor. Bis ich das erste mal das Gefühl hatte meinen Quadrocopter unter Kontrolle zu haben ist einige Zeit vergangen.
Aber je mehr man übt, desto mehr macht es auch Spaß. Und wichtig ist immer genug Akkus dabei zu haben. Und Propeller 😉
Ja. Für einen Copter ist unser Garten auch zu klein. Sind zwar 6×6 Meter, aber das ist einfach zu wenig. Und ich will nicht den Garten der Nachbarn nutzen 🙂
Aber wir haben es hier relativ ländlich. Also ein paar Minuten Fahrt und schon ist genug Wiese zum üben da.
Auch ich fange jetzt mit 62 an diese Dinger selber zu bauen
Ich glaube für diesen Spaß ist man auch nie zu alt.
Hey ! Vielen Dank für die tolle Anleitung . Das alles hast du super gut erkärt . Du hast allerdings kein Feedbak über die Nutzungsdauer der von dir verwendeten Akkus gegeben ( 2200 mAh ) . Und wie lange war das Ding im Himmel 🙂 ??
Sorry für die späte Antwort. Der Stromverbrauch war relativ hoch. Insgesamt fliegt das Ding um die 15 Minuten auf Vollgas. Aktuell müsste ich da sogar mal wieder dran. Aber nachdem ich mir eine DJI Mavic Air 2 gekauft hatte, ging da viel Zeit rein. Aber insgesamt hat der eigene Aufbau sehr viel Spaß gemacht.